

Until relatively recently, robots have been kept in cages. This isn’t to stop them from getting out (although I have a niggling notion that day may come)—rather, to prevent humans from getting in. I’m thinking of honking big industrial robots in facilities like automobile factories.
While members of this class of robots are awesomely good at what they do (picking up an object weighing hundreds of pounds and waving it around as though it were as light as a feather, for example), most of them are as dumb as a bag of rocks (or nuts and bolts).
Just saying “nuts and bolts” reminds me that, in our younger years, my friend Little Steve (to distinguish him from Tall Steve) used to work at an engineers’ fasteners and abrasives supply company called G.S. Worth in Sheffield, England. He said the employees used to quip that the company’s catchphrase was, “For a quick screw, bolt down to Worth’s,” but I’m sure I don’t know what he meant (I was far too young and innocent for such ribaldry). But we digress…
By comparison, collaborative robots (a.k.a. cobots) enjoy direct human-robot interaction within a shared space. According to Apollo Research Reports, the global collaborative robot market will grow at 40.5% CAGR from USD 760 million in 2022 to USD 22.6 billion in 2032.
Just to make sure we’re all tap-dancing to the same skirl of the bagpipes, let’s turn to the Wikipedia where we learn that the cobot concept was conceived circa 1996 by two professors—J. Edward Colgate and Michael Peshkin—at Northwestern University. (O-M-G. When I just typed “1996,” I was thinking “that’s not so long ago,” but I just realized it’s almost 30 years in the past as I pen this prose … where does the time go?)
The International Federation of Robotics (IFR) is a global industry association of robot manufacturers and national robot associations. According to the Wikipedia:
The IFR defines four levels of collaboration between industrial robots and human workers:
- Coexistence: Human and robot work alongside each other without a fence, but with no shared workspace.
- Sequential Collaboration: Human and robot are active in shared workspace but their motions are sequential; they do not work on a part at the same time.
- Cooperation: Robot and human work on the same part at the same time, with both in motion.
- Responsive Collaboration: The robot responds in real-time to movement of the human worker.
In most industrial applications of cobots today, the cobot and human worker share the same space but complete tasks independently or sequentially (Co-existence or Sequential Collaboration.) Co-operation or Responsive Collaboration are presently less common.
Hmmm. That’s as may be. But I dare to make my own prediction that the recent rampant rise in artificial intelligence (AI) and machine learning (ML), coupled with advances in sensing technologies—like 4G radar and 4G lidar (which can generate precise 3D point clouds that can be used on their own or in conjunction with 2D images from regular RGB cameras)—is going to result in a truly collaborative “cobotic explosion” (and that’s not something you expect to hear yourself say every day).
I suddenly started to worry that, at 79 words, my preceding sentence was overlong. But then I reminded myself that Victor Hugo had a 136-word sentence in Les Misérables, Jane Austen employed a 180-word sentence in Emma (thanks to my wife—Gina the Gorgeous—I’ve seen more TV and movie interpretations of this tale than any man should), Charles Dickens enticed us with a 251-word sentence in Barnaby Rudge, Hermen Melville flaunted a 467-word offering in Moby Dick, and Marcel Proust made a bold attempt for the gold with a 958-word sentence in Remembrance of Things Past. Having said all this, we would be hard-pushed to challenge Gabriel Garcia Marquez with his 2156-word behemoth in The Last Voyage of the Ghost Ship (Gabriel also authored Love in the Time of Cholera, which is a lot better than it sounds).
Speaking of Les Misérables (we weren’t, but we are now), did you ever see the boy band Collabro singing Stars from Les Misérables in their audition for Britain’s Got Talent. I don’t mind telling you that this brought a little tear of joy to my eye (unlike my own warblings that are known to bring tears of anguish to all within earshot).
But I fear we have digressed once more… I know, I know… I can hear you saying, “Tell me it’s not so,” but it’s not my fault. This is just the way (what I laughingly call) my mind works. Just be thankful you’re not in here with me (there simply isn’t enough room).
There are two things to bear in mind on the cobot front. First, these little scamps are composed of two main aspects—their hardware and their software. As an electronic engineer, I always think of the term “hardware” primarily in terms of electronic components like resistors, capacitors, inductors, semiconductors, and microcontrollers. In this context, however, many cobot creators would regard “hardware” as primarily relating to any electromechanical components, like arms, wheels, motors.
With respect to the software, we might consider this in terms of a hardware interface layer, a middleware (operating system) layer, a perception and sensing layer, a motion planning and control layer, a task planning and execution layer, a user interface and programming layer, and a cloud and connectivity layer (phew!).
Artificial intelligence has a part to play (either directly or indirectly) in all these layers. Also, functional safety (FuSa) is a critical aspect of a cobot’s design and operation, ensuring the system operates without causing harm to humans, equipment, or its environment, even in the event of faults or failures. Like artificial intelligence, FuSa intersects with multiple facets of a cobot’s software and hardware architectures.
The trigger for my rambling ruminations Is that I was just chatting with Jenny Shern, who is General Manager at NexCOBOT (a NEXCOM Company). The flagship company, NEXCOM, which is headquartered in Taipei, Taiwan, was founded more than 30 years ago, in 1992. Over the years, NEXCOM has evolved to encompass various business units and subsidiaries.
NEXCOM’s four business units are NCS (Network and Communication Solutions), MCS (Mobile Computing Solutions), IPS (Intelligent Platforms and Services), and MHI (Medical and Healthcare Informatics). The six subsidiaries are NexCOBOT (Robotics and Motion Solutions), NexAIoT (IoT Automation Services), EMBUX (Industrial IoT Networking), AIC (AIoT Cloud), TMRTEK (IIoT Security Solutions), and GreenBase (Intelligent Digital Security). The reason this is of interest to us here is that the guys and gals at NexCOBOT can reach out to the chaps and chapesses at any of these other business units and subsidiaries as required (and vice versa, of course).

NEXCOM’s business units and subsidiaries play multiple roles in smart manufacturing (Source: NexCOBOT)
Jenny tells me that a lot of cobot creation companies are springing up around the world. Many of these enterprises start with the intention of creating all aspects of their cobot hardware and software themselves. But they quickly come to the conclusion that the hardware is the easy part. This is when they start to look around to see who can help them with the software side of things, at which point the folks from NexCOBOT leap onto the center stage with a fanfare of sarrusophones (that’s something you don’t forget in a hurry… no matter how hard you try).
NexCOBOT’s claim-to-fame is their robot controller in the form of a hardware platform and the software stack we discussed earlier. They also have an extensive ecosystem of partners who supply sensors, actuators (including motors and servos), and everything up to robot arms and platforms.
These robot controllers power a diverse range of robot forms and applications, from glue-dispensing robots to 7-axis dual arm robots to humanoid robots.

Diverse forms and robotic applications (Source: NexCOBOT)
NexCOBOT’s General Robot Controller (GRC) is an industrial and collaborative robot controller that supports myriad diverse robotic forms and functions. Its associated graphical user interface (GUI) allows users to configure the type and size of their robotic application, enter any associated parameters, and immediately simulate the movement and performance of the system.
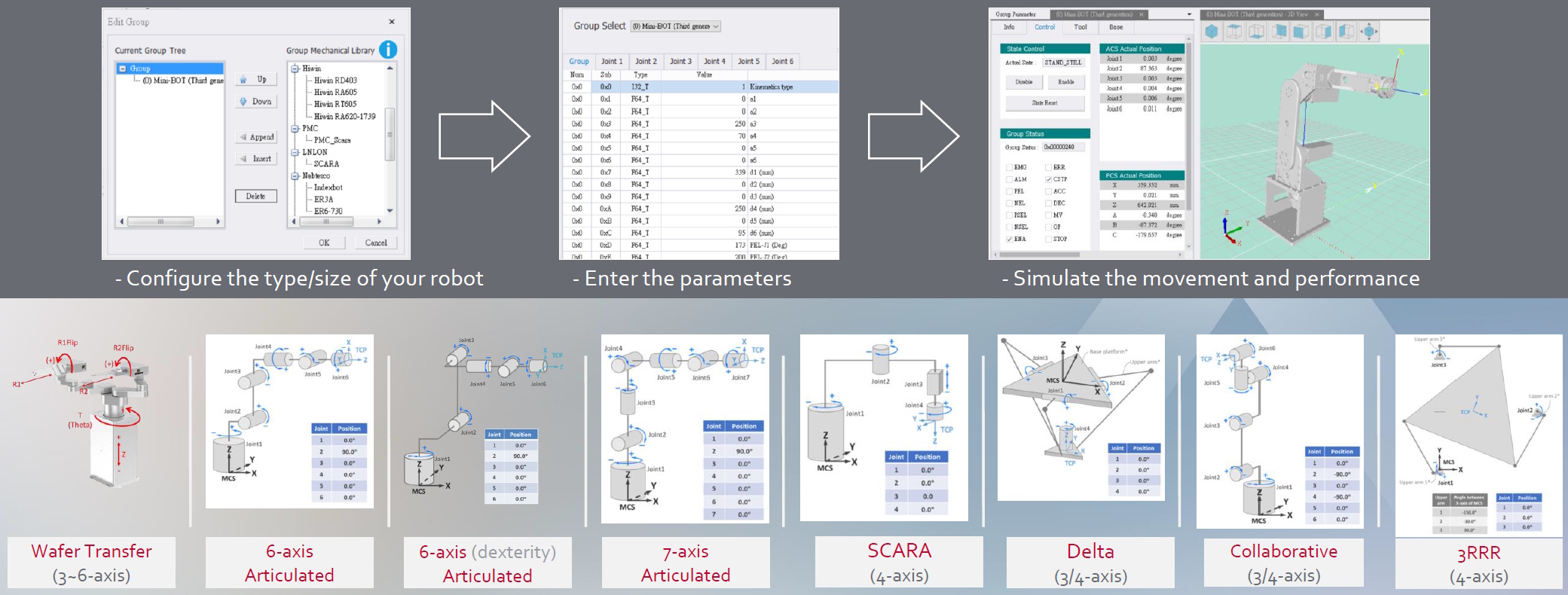
Configurable, parameterizable, and simulatable (Source: NexCOBOT)
Furthermore, the folks at NexCOBOT offer professional robot development services for the design, kinematic analysis, and workload performance/optimization of the system.
But what about FuSa? I’m so glad you asked. ISO 10218 is an international standard for industrial robot safety. The chaps and chapesses at NexCOBOT are experts in robotic functional safety. In addition to being ISO 10218 certified themselves, the guys and gals at NexCOBOT are adept at helping their customers prepare the documentation and taking the completed cobot through the ISO 10218 certification process.

Welcome to the future (Source: NexCOBOT)
I don’t know about you, but I find it tremendously exciting to see an image like the one above showing uncaged cobots on a factory floor. On the other hand, I’m also envisaging what it would be like to walk into this facility, for everything to grind to a halt, and for all these cobots to slowly turn their heads to look at me in a meaningful way. (I bet they would be impressed by whatever Hawaiian shirt I was sporting that day.)
What say you? Are you excited by a future filled with cobot companions, or are you poised to pack a survival kit and head for the hills? Do you have any thoughts you’d care to share? As always, I welcome your captivating comments.


