


“We choose to go to the Moon in this decade and do the other things, not because they are easy, but because they are hard; because that goal will serve to organize and measure the best of our energies and skills, because that challenge is one that we are willing to accept, one we are unwilling to postpone, and one we intend to win.” – John F Kennedy, President of the United States, September 12, 1962
“If there’s going to be a vehicle on the moon, it’s going to be a General Motors vehicle, and I’m going to make sure that happens.” – Sam Romano, Program Manager, Lunar Roving Vehicle Mobility System project, Delco Electronics
“Well, there she sits, buddy, just a gleaming in the sun
“There to greet a working man when his day is done
“I’m gonna pack my pa and I’m gonna pack my aunt
“I’m gonna take them down to the Cadillac Ranch” – Bruce Springsteen, Cadillac Ranch, 1980
“Well, I’m not bragging babe so don’t put me down (deuce coupe)
“But I’ve got the fastest set of wheels in town (deuce coupe)
“When something comes up to me, he don’t even try (deuce coupe)
“’Cause if I had a set of wings, man I know she could fly” – Beach Boys, Little Deuce Coupe, 1963
President Kennedy’s initial declaration in 1962 precipitated the Project Apollo space program, which took us to the moon. Kennedy loosely defined one main goal: get there and get back. His stated vision didn’t extend past getting there. The entire US human spaceflight program through Projects Mercury, Gemini, and the initial part of Project Apollo required that NASA master a step-by-step sequence of increasingly difficult tasks needed to set a person on the moon. But what happens after that?
Science happens. In the wake of Apollo 11’s success in putting Neil Armstrong and Buzz Aldrin on the moon, NASA started sending astronauts trained in geology and actual geologists to the moon. During Apollo 11, 12, and 14, the astronaut geologists walked on the moon’s surface, taking photographs and collecting rocks. Hundreds of pounds of rocks.
On Apollo 15, 16, and 17, the astronauts drove on the moon’s surface in a car manufactured jointly by Boeing and General Motors. I have vivid memories of the Project Apollo astronauts driving the Lunar Rover – formally called the Lunar Roving Vehicle or LRV – on the moon, jaunting along, tossing fishtails of lunar dust into the air – oops, vacuum – and cutting donuts in the lunar regolith. If you were watching these same videos during those times, perhaps you share those memories.
Besides the astronauts themselves, the LRV was the coolest thing Project Apollo sent to the moon.
“Across the Airless Wilds,” a new book written by Earl Swift, chronicles the LRV’s history, from Werner von Braun’s early 3-part article series, which appeared in Collier’s magazine in 1952, through the development of conceptual lunar surface vehicles long before NASA decided it could put a car on the moon, to the breakneck, 17-month development program triggered by NASA’s late decision to build the LRV and take it to the moon as part of the later Project Apollo missions.
Werner von Braun, who’d become the first director of NASA’s Marshall Space Flight Center by this time, had been publicly advocating for a lunar exploration vehicle for nearly two decades, starting with his Collier’s articles and his television collaborations with Walt Disney. On May 23, 1969, just two months before the Apollo 11 launch and moon landing, NASA finally authorized von Braun to proceed with the development of the LRV. Four vehicles would be needed to take to the moon, and the first vehicle had to be ready by April 1971 – less than two years in the future.
Swift’s book carefully documents the Lunar Rover’s rapid development from the early competition among competing contract bidders (Bendix, Boeing/GM, Chrysler, and Grumman), to the awarding of the contract to Boeing/GM (not NASA’s first choice and not the lowest bidder), through many of the engineering obstacles overcome by the chosen development team, the multiple cost overruns caused by the hurried work needed to meet the program’s deadlines, and onward to the successful conclusion of the project with three LRVs carrying six astronauts on the moon’s surface in style. As the Soviets reportedly said: Americans take their cars everywhere.
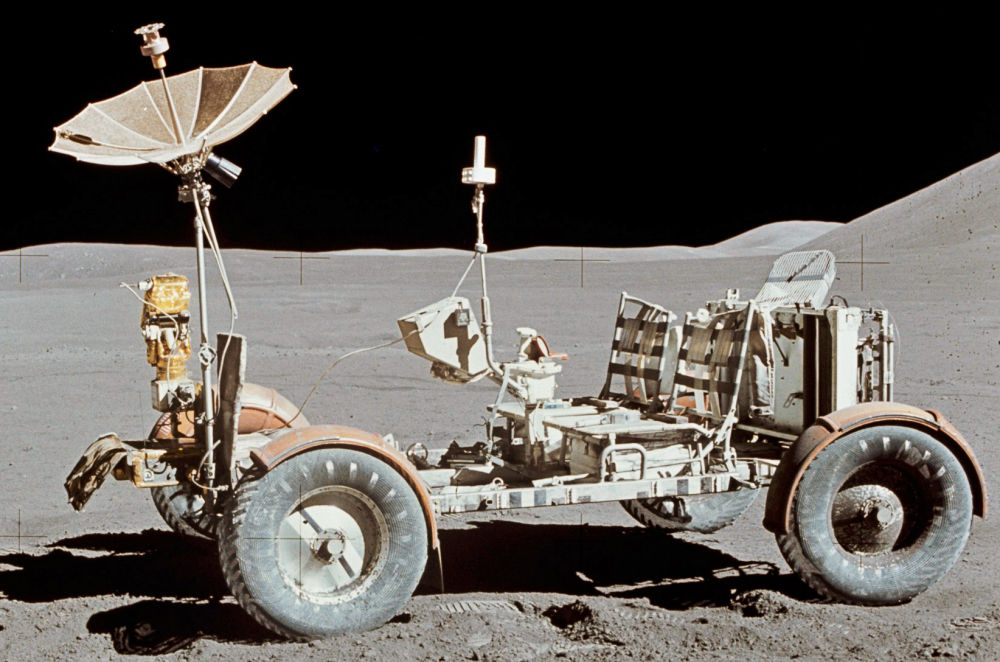
The first Lunar Rover to reach the moon landed with Apollo 15 on July 30, 1971. Image credit: NASA/Dave Scott
“Across the Airless Wilds” is truly an engineer’s book, because Swift delves deeply into the technical challenges and the innovations needed to meet the many challenges that the LRV’s designers needed to overcome to meet NASA’s specifications for the vehicle. Throughout the book, Swift profiles the people who developed those technical innovations. Some of these innovations included:
The LRV’s wheels, tires, and chassis
Normal rubber pneumatic tires wouldn’t survive on the moon. The temperature extremes would quickly degrade the rubber, but not before the air inside of the tires exerted enough outward pressure to explode the tires in the airless vacuum of space. The LRV needed a more specialized solution to meet the challenges of the moon’s terrain and environment.
Two men sit atop the team that developed the LRV’s wheels and tires. The first, Mieczysław G. (M.G. or Greg) Bekker was born in Strzyzow, Poland in 1905. After serving in Poland’s military, he started the Warsaw University of Technology’s Special Vehicles Laboratory where he devoted his career to finding ways to allow vehicles to traverse unpaved terrain. When Hitler invaded Poland in September 1939, Bekker and his family escaped to France and then, after Germany invaded France, to Canada.
He became an officer in the Canadian army and continued researching his passion: vehicle mobility. By the mid-1950s, he was on permanent loan to the US military and took a position with the US Tank and Automotive Command at the Detroit Arsenal to continue his work. About that time, he published his first book, “Theory of Land Locomotion: The Mechanics of Vehicle Mobility,” which documented the science of “terramechanics,” the study of off-road vehicles and their interaction with various soils. Bekker had been developing this branch of science for decades, and he invented the term.
While at the Detroit Arsenal, Bekker hired the second person critical to the development of the LRV’s tires and wheels. Ferenc Pavlics was born in 1928, in Balozsameggyes, Hungary. He was a mechanical and scientific wunderkind at an early age, attended the Technical University of Budapest, and became an engineer. When the Soviet Union crushed the 1956 Hungarian revolt, Pavlics and his wife escaped to Austria and then to the United States. Bekker found Pavlics on a recruiting tour just five days after Pavlics arrived in New York and immediately hired him for his terramechanics lab at the Detroit Arsenal.
By 1957, Bekker had become intrigued by the challenges of surface locomotion on the moon and had tasked Pavlics with creating soil testbeds that mimicked Bekker’s best guess for soils to be found on the moon. That was a year before President Eisenhower created NASA. The US Army lost interest in the project and barred Bekker from further moon-centric investigations. However, shortly after that, General Motors (GM) offered to let Bekker start a similar lab for off-road mobility research in the company’s brand-new Defense Systems Division. GM’s lab ended up in Santa Barbara, California, to the delight of Bekker and Pavlics, who were soon developing ideas for lunar vehicles in sunny California.
The pair soon developed a flexible, six-wheeled vehicle concept. The six-wheel idea didn’t make it to the moon, but Pavlics eventually transformed the six-wheeled chassis into a foldable, four-wheeled chassis to meet NASA’s requirements. He also developed the LRV’s wheels and tires. The tires were woven as a mesh from stainless-steel music wire, which was attached to a lightweight metal wheel rim. Together, the rigid chassis with more conventional shock absorbers and torsion bars, along with the wire-mesh tires served as the LRV’s suspension system.
The LRV’s power train
From the start, it was clear that the LRV would be an electric vehicle (EV). The drive system would be based on batteries and four electric motors, one for each wheel. The LRV would be a 4×4 EV moon buggy. Boeing initially proposed the use of brushed dc motors for the LRV’s electric drive system, but NASA engineers balked. They did not know how the motors’ carbon brushes would fare in the harsh lunar environment. According to Swift’s book, NASA forced Boeing to contract with General Electric to develop brushless motors for the LRV, which increased the LRV project cost by about half a million dollars. According to a 1972 Boeing brochure titled “Lunar Roving Vehicle,” the LRVs that went to the moon used four ¼-horsepower, brushed dc motors with a pulse-width-modulated electrical drive for speed control.
The decision to use electric motors to power each wheel independently immediately presented the challenge of developing a rugged, lightweight gearing system that would work reliably over the temperature extremes that would be encountered on the airless moon. Typical reduction gearboxes to drop the electric motors’ thousands of RPM to wheel speed and torque requirements were too heavy and too complex for NASA’s tastes. Instead, Boeing used a unique RPM-reduction unit called a harmonic drive, invented by Clarence Walton Musser.
The Harmonic Drive, a term now copyrighted by a company named Harmonic Drive SE, contains only three components. The first component is a smooth elliptical steel disc, driven by the electric motor. This disc drives a ball bearing, which in turn deforms a flexible, toothed steel sleeve, called the Flexspline. The outer teeth of the Flexspline engage with a circular spline gear, but only at the furthest extremes of the steel disc’s elliptical shape. The Flexspline has two fewer teeth than the circular spline gear, and the result is a simple mechanical device with an 80:1 gear ratio. Despite NASA’s doubts, the Harmonic Drive worked perfectly on the LRV and is now the gear-reduction mechanism of choice for many space vehicle applications.
While I have summarized many of the engineering challenges covered in Swift’s book, “Across the Airless Wilds” doesn’t provide much depth for the electrical engineering aspects of the LRV, so I did a little of my own research. Here’s some supplemental material about the LRV that does not appear in Swift’s book.
LRV Batteries
Eagle-Picher Industries (today, EaglePicher Technologies) supplied the two 36-volt, non-rechargeable silver-zinc batteries that powered the LRV. The company started in 1843 as the White Lead Company, and was located in Cincinnati, Ohio. About a decade later, the company became the Eagle White Lead Works, which merged with the Picher Lead Company of Joplin, Missouri in 1906 and became Eagle-Picher Lead. The company started manufacturing batteries in the 1920s and developed specialized batteries to power torpedoes for the US Navy during the 1940s.
By the 1950s, the newly renamed Eagle-Picher Industries started making silver-zinc batteries for the US military’s rocket and missile programs. In 1958, Eagle-Picher developed the batteries used in the first US satellite to reach space successfully, Explorer 1, and also made the batteries used in the Mercury, Gemini, and Apollo manned space programs. EaglePicher Technologies is still with us, and the company has continued to develop batteries for satellites and other space applications. It now has batteries in the rovers exploring Mars.
LRV Navigation System
Navigation on the moon is more complex than navigating on the Earth. The moon has no magnetic field, so a magnetic compass is useless. NASA realized that the LRV would allow astronauts to roam far enough away from the Lunar Module (LM) to lose sight of it. With no visual clues as to the location of the LM, no compass, and maps made solely from overhead photos of the moon’s surface, the astronauts might get lost. Indeed, the Apollo astronauts did have trouble identifying landmarks on the moon, as described in Swift’s book.
NASA’s solution was to specify that the LRV should have a relatively simple navigation system that always pointed the way back, with an estimate of the distance to the LM. The LRV’s directional compass was based on a 2-DOF (two degrees of freedom) gyroscope supplied by Lear-Siegler, a company with a long history of supplying navigational gyroscopes to the US military and aerospace industries.
Astronauts would manually set the gyrocompass to point to lunar north using the sun’s position combined with corrections for the LRV’s roll and yaw, which were provided by mechanical pendulum sensors. Once set, the gyrocompass continued to orient towards lunar north, and its position drove a 400-Hz synchro system and heading indicator on the LRV’s control panel. Synchros had long been in use for gun directors, so the technology was well in hand by the time of the Apollo program. The LRV’s heading indicator gave a heading relative to the initial lunar north setting. The gyroscope’s drift was specified to be less than 10 degrees per hour, and practical testing on Earth over long sorties showed that the gyrocompass produced a correct heading within plus or minus five degrees.
Range was determined by encoders placed on each of the LRV’s wheels. Each of the four encoders generated nine pulses per wheel revolution. The encoder pulses and the analog signals from the gyrocompass served as inputs to an embedded analog/digital computer that drove bearing and range indicators on the LRV’s control panel. The bearing indicator always pointed back to the LM. NASA expected that these indicators would be accurate enough to bring the astronauts within visual range of the LM, and the astronauts could take things from there.
Boeing developed the embedded computer, called the Signal Processing Unit (SPU), that drove the bearing and range displays. The SPU also drove a 200-µamp analog panel meter that served as the LRV’s speedometer. The meter was calibrated and marked in kilometers per hour. Logic in the SPU accepted the pulses from all four wheel encoders and selected the pulses from the third slowest wheel to drive the range calculations. The SPU combined the odometer readings from the wheel calculations with the heading information to estimate the distance back to the LM. The “third slowest” algorithm was developed so that a disabled or dragging wheel would not degrade the accuracy of the range calculation. It also avoided errors caused by a freely spinning wheel that had left the ground.
SPU calculations used the CORDIC algorithm, which itself has a long and storied history that’s not mentioned or discussed in Swift’s book. This algorithm, developed by Jack Volder in 1956, was first used in the navigation computer of the Convair B-58 strategic bomber aircraft in 1958 and was later incorporated into navigation computers designed by Martin-Orlando, Computer Control, Litton, Kearfott, Lear-Siegler, Sperry, Raytheon, and Collins Radio. Hewlett-Packard used the CORDIC algorithm to implement trigonometric and transcendental functions in the HP 9100A programmable desktop calculator, introduced in 1968. Based on its block diagram, the SPU’s hardware and logic were clearly purpose-built for this one role in the LRV. Boeing designed the SPU just a year or two before Intel introduced the first commercial microprocessor, the 4-bit 4004, so it must have been built with discrete transistors or with early 1- and 2-gate ICs, like the Apollo guidance computer.
Conclusion
Project Apollo left three LRVs on the moon. Swift’s book does a fantastic job of documenting the LRV project and its successes. This is a long book review, but Swift’s book describes many more adventures (the LRV project nearly died more than once), contains significantly more detail, and profiles many more organizations and actors who played critical roles in the development of the LRV. Without Swift’s extensive document research and numerous personal interviews with people involved in the LRV project, this history would be extremely difficult to piece together. Although the LRV was invaluable in amplifying the amount of science that could be done on the moon by giving the astronauts the ability to roam far and wide, the LRV’s history has largely been overshadowed by the histories, accomplishments, and other very important aspects of Project Apollo. “Across the Airless Wilds” brings the LRV into the light of history. It is a worthy book for students of space history and enthusiasts who follow the history of engineering technology.

