


Way back in the mists of time when I was a young lad circa the middle of the last century, towards the end of the previous millennium, one of the things that drove my ambitions to become an engineer was my desire to work with robots.
At that time, the only robots I’d really seen were like Gort in the 1951 science fiction movie The Day the Earth Stood Still, Robbie the Robot in the 1956 science fiction film Forbidden Planet, and Robot Model B-9 in the Lost In Space science fiction television series, which originally aired in 1965.
As an aside, I just read on the Wikipedia that the first-ever introduction of a humanoid-appearance mechanical man that would satisfy the later “humanoid robot” definition occurred in 1907, which was some fifteen years before the word “robot” was coined. This was Tik-Tok from Lyman Frank Baum’s children’s novel Ozma of Oz. Tik-Tok was powered with a trio of clockwork movements for his thinking, movement, and speech, none of which he could wind up himself (which would appear to be something of a design flaw, if you ask me).
Of course, there were also cartoon robots, like Rosey (later spelled Rosie) from The Jetsons, which originally aired in 1962.
What about robotic pets? I’m glad you asked. The first known robotic pet was a robot dog called Sparko, which was built by the American company Westinghouse in 1940. Sad to relate, this never saw the light of day due to lack of public interest. The first robotic pet to appear on the market was the Furby in 1998. I once met one of the big scamps who created this little scamp, and I was entranced to hear the way in which they had developed the Furby’s spoken language.
The first Star Wars film in 1977 (later subtitled Episode IV – A New Hope) introduced us to spiffy robots like R2-D2 and C-3PO. These were far more advanced than the robot dog called K9, whom we first met in a 1977 episode of Doctor Who. In addition to his encyclopedic knowledge and his vast computer intelligence, K9 often came in handy for the powerful laser weapon concealed in his nose.
I used to love 2D cartoons when I was a kid. At that time, I could never have conceived what their 3D counterparts would look like. I think that watching something like Jimmy Neutron: Boy Genius and his robot dog Goddard (named after American professor, physicist, and inventor Robert Hutchings Goddard) would have blown (what I laughingly refer to as) my mind.
As another aside, more than a decade ago as I pen these words, I ran across tales of a mysterious robot dog found in an antique shop in Paris by a professor of philosophy at Tufts University. The only photo I ever saw of this bodacious beauty is shown below. Unfortunately, I have no idea as to the owner of this image (I will happily credit the owner or delete the image from this column on request).
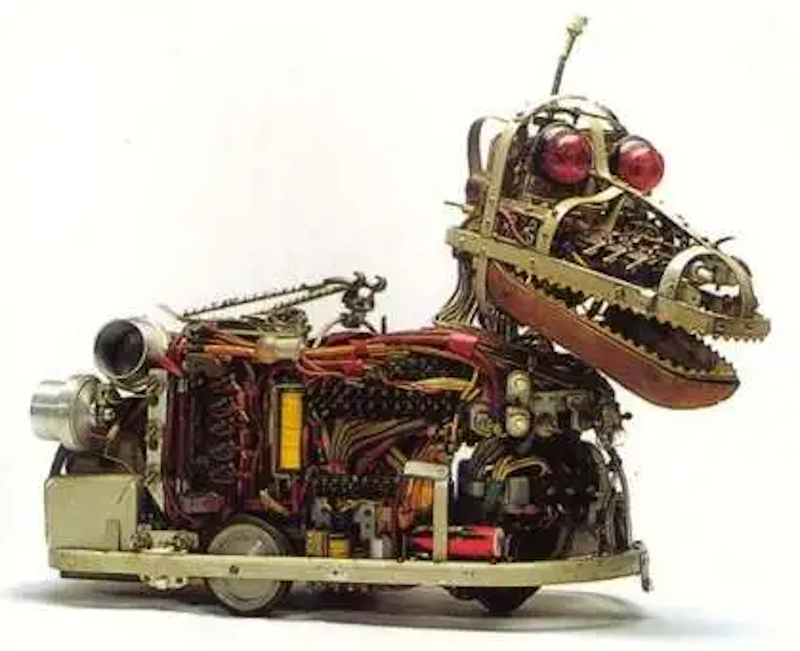
Mystery robot dog (Source: Unknown)
My poor old noggin is buzzing with questions. Who created this masterpiece? Why? What can it do? I would love to lay my hands on it, refurbish it, and bring it back to its former glory with the help of some friends.
When I was about 10 years old—so this would be around 1967—one of my dad’s friends came up from London to spend the Christmas holidays with us. I knew him as “Uncle Digger.” I think his family name was “Digby” or “Digsby,” which has an Anglo-Saxon origin as someone who created, or lived near, a dike or a ditch.
My dad told me that Digger was an electronics engineer, so I asked him how I could build a robot. Of course, these were the days when sensors were limited in scope and ability, all signal processing was performed using analog techniques, and digital microprocessors weren’t even a twinkle in their creators’ eyes. This explains why Digger filled page after page in my notebook with eye-wateringly complex circuit diagrams featuring individual transistors, resistors, capacitors, and inductors. It was only my natural stupidity that saved me from being scared away from engineering for life.
Of course, when anyone says “robot,” my knee-jerk reaction is to think of Isaac Asimov’s Three Laws of Robotics, his books I Robot, The Rest of the Robots, The Caves of Steel, and The Naked Sun, and humanoid looking machines, like EVE from Halodi Robotics (see Halodi’s Humanoid Robots are Already Amongst Us!). However, there are humongous numbers of machines in the form of robot arms that are currently performing myriad useful tasks.
In addition to the hulk-like arms found in places like automobile factories, there is an increasing use of smaller arms for all sorts of applications. Also, there is a current trend toward the use of collaborative robots (cobots), which are robots intended for direct robot-human interaction within a shared space.
I was just reading a column on the American Society of Mechanical Engineers (ASME) website: How Many Axes Does Your Robot Need? As this article notes: “An axis in robotic terminology represents a degree of freedom (DOF). For example, if a robot has three degrees of freedom, it can operate in the x, y, and z planes. However, it cannot tilt or turn.” The same article notes: “Most industrial robots utilize six axes, which give them the ability to perform a wide variety of industrial tasks compared to robots with fewer axes. Six axes allow a robot to move in the x, y, and z planes, as well as position itself using roll, pitch, and yaw movements.”
The reason I’m waffling on about this here is that I was just chatting with Collin Ayres and Jim Adamski, who are Regional Channel Partner Managers for Kassow Robots. Not surprisingly, they are rather proud of the fact that Kassow Robots offers 7-axis collaborative robots. They tell me that having 7 axes allows these robot arms to mimic all the capabilities (motion-wise) of a human arm.

A 7-axis robot arm (Source: Kassow Robots)
To illustrate what this means, one of Kassow Robots’ partners, Dassault Systèmes, used their DELMIA software to create simulation images and videos of one of these arms in action. Just looking at the image below makes it easy to visualize the robot arm reaching around obstacles to make changes to a CNC machine setup.
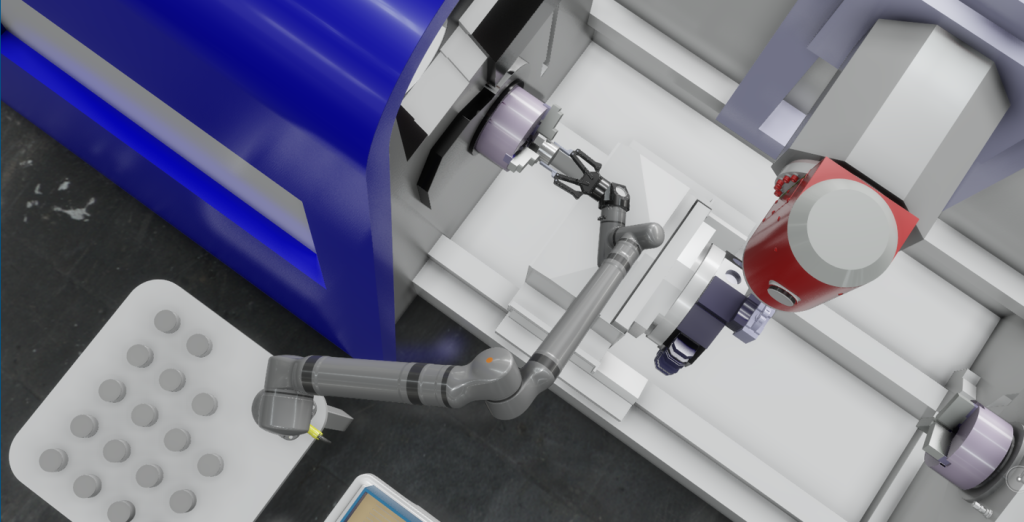
Visualization of a 7-axis robot arm in action
(Source: Kassow Robots and Dassault Systèmes)
Collin and Jim tell me that their KR Series of cobots come in a variety of sizes and capabilities, with reaches up to 1,800mm capable of lifting payloads up to 18kg. All I can say is that 1.8 meters is one heck of a long reach.

The KR series of 7-axis robot arms (Source: Kassow Robots)
The folks at Kassow Robots focus on the robot arms and controllers. They have an ecosystem of partners who can supply grippers, vision systems, and software, including artificial intelligence (AI), machine learning (ML), and deep learning (DL) applications. I was just looking at a couple of videos showing these arms in action.
After watching these little beauties, I’m once more feeling tempted to splash the cash on a 6DOF LewanSoul Robotic Arm from Amazon. Maybe for my birthday… or next Christmas… How about you? Are you interested in experimenting with your own robot arm?


… about the robot dog …
Its called ‘Tati’, you can find more about it under:
https://cyberneticzoo.com/cyberneticanimals/195x-tati-the-cybernetic-dog-owned-by-daniel-dennett-built-in-france-belgium/
FANTASTIC!!! Thank you so much for sharing this