


“The Moon is a Harsh Mistress,” a Hugo-award-winning SF novel published by Robert Heinlein in 1966, is an apt title that explains why so many actual moon missions fail. Landing on the Earth’s moon safely is hard. The first spacecraft to crash on the moon was the USSR’s Luna 2 spacecraft. It “impacted” the moon in 1959, followed by the first US spacecraft to impact the moon, Ranger 4 in 1962. The Soviet Union failed to soft-land a craft on the moon several times before Luna 9 stuck its landing in 1966. Surveyor 1 from the US landed successfully later that same year. A total of only sixteen Soviet, U.S., Chinese and Indian spacecraft have made soft landings on the moon’s surface.
Now, the first commercial spacecraft, Odysseus from Intuitive Machines, has made a soft landing near the moon’s heavily cratered south pole, although it doesn’t appear to have stuck the landing. Instead, the spacecraft seems to have landed faster, sooner, and harder than expected. The hard landing broke one or two landing legs, and Odysseus then leaned over as it settled into the moon’s sloped surface. Nevertheless, Odysseus didn’t crash land, it didn’t break up, and it stayed operational for a few days until the sun set. A pair of FPGAs were instrumental in making the mission a qualified success.
Odysseus approaches the moon. The Jeff Koons art sculpture Moon Phases appears just behind the solar panels in the lower left part of the image. Image credit: Intuitive Machines
Intuitive Machines contracted with NASA to conduct three Nova-C missions for the Commercial Lunar Payload Services (CLPS) program, which delivers small science and technology-development payloads to the moon. The Odysseus lander, part of the company’s first CLPS mission called IM-1, carried several payloads, including six instruments: the Navigation Doppler Lidar (NDL) developed by NASA Langley Research Center, a Radio Frequency Mass Gauge (RFMG) developed at NASA’s Glenn Research Center that estimates propellant levels, an experiment called Radio wave Observation at the Lunar Surface of the photoElectron Sheath (ROLSES) that’s designed to measure the electron density in the plasma near the moon’s surface, a passive laser retroreflector array that serves as a permanent landing marker, a stereo camera, and the Lunar Node-1 navigation demonstrator, which is a cubesat-sized autonomous navigation unit that might be used by future landers, rovers, and astronauts on the moon.
Additionally, Odysseus carried precursor imaging instruments from the International Lunar Observatory Association (ILOA) in Hawaii, a Jeff Koons art sculpture called Moon Phases, a camera cubesat called EagleCam built by students at Embry–Riddle Aeronautical University in Daytona Beach, and an Omni-Heat Infinity insulation blanket from Columbia Sportswear, which serves as an insulating layer for the lander’s cryogenic propulsion tanks. (Talk about product placement!) All payloads appear to have been delivered to the moon intact.
That’s the good news. The bad news is that the EagleCam did not deploy according to plan, so we didn’t get images of the landing. Worse, none of the Odysseus high-gain antennas are pointed towards the Earth because the lander appears to have leaned over during the landing. Consequently, only low bit-rate communications were possible with the commercial communications network set up by Intuitive Machines. However, once the supersensitive Murriyang 64m antenna in Parkes, Australia was brought online and tuned for the RF multipath situation on the moon, the IM-1 team has been able to download hundreds of megabytes of telemetry, scientific data, and images. (Murriyang, a CSIRO (Commonwealth Scientific and Industrial Research Organisation) asset, served as a primary receiving station for the Apollo 11 mission to the Moon back in 1969 and received most of the video sent from the moon during that mission. This antenna was the title character in the movie “The Dish.”) Meanwhile, the Lunar Node-1 navigation beacon has been independently communicating with the Earth over NASA’s Deep Space Network.
Although the instruments on board Odysseus were riding along as technology demonstrators, the RFMG and NDL became flight tested during the voyage. At one point en route to the moon, anomalously cold propellant tank temperature readings led flight controllers at Intuitive Machines to suspect that the spacecraft may have developed a propellant leak. It’s likely they were extremely skittish about the possibility of such a leak, because Astrobotics’s Peregrine moon lander had developed a propellant leak from a ruptured oxidizer tank just a month earlier and had failed to land on the moon. (Astrobotics is also participating in NASA’s CLPS program.) The RFMG experimental instrument on board Odysseus confirmed that the lander had the expected amount of propellant in the tank. No leak. This is the first space mission to incorporate the RFMG in a propellant tank.
When Odysseus arrived at the moon, it went into a polar orbit. The orbit was too elliptical for the mission plan, so flight controllers initiated an engine burn to circularize the orbit. At that point, the flight controllers fired up the laser rangefinder on Odysseus to measure the craft’s altitude above the moon’s surface. The laser rangefinder, an essential part of the spacecraft’s landing instrumentation, did not activate. The IM-1 team determined that the mission had lifted off from the launch pad with the laser rangefinder still set to safe mode, which guards against eye damage from the rangefinder’s laser during pre-launch activities. The rangefinder’s safe mode must be manually disabled before launch, and the mode cannot be changed after the spacecraft launches. Without the laser rangefinder, Odysseus would not be able to land on the moon safely.

Here’s the Odysseus lander with a broken landing leg, leaning on the moon. The orange object in the upper left of the image is a cryogenic tank wrapped in Columbia Sportswear’s Omni-Heat space blanket. Image credit: Intuitive Machines
However, the Odysseus lander also carried the NDL as a payload, which was operating in shadow mode to the laser rangefinder. In other words, the plan was for the NDL’s readings to be confirmed by the laser rangefinder readings. With the laser rangefinder out of commission, the IM-1 team came up with a new plan. The team needed only one orbit of the moon to rewrite the lander’s software to make the NDL the primary instrument for measuring altitude. The landing then commenced. Unfortunately, the software patch missed setting a “data valid” flag, so the NDL supplied accurate data, but the landing software ignored it, which may explain the rough landing. Despite early assertions that the NDL saved the mission, Intuitive Machines realized that the NDL’s data had not been used for the landing after the company analyzed the downloaded telemetry three days later. Except for the broken landing leg or legs, Odysseus managed to land successfully using only IMU and optical information from its cameras. Nevertheless, it’s possible that Intuitive Machines would not have attempted the landing without patching in the NDL and NASA is over the moon, so to speak, at the unexpected change in the NDL’s status from experimental instrument to TRL-9 (Technology Readiness Level 9, the highest rating), which means the technology is flight-proven.
NASA Langley has been developing the NDL since 2008. The instrument uses frequency modulated, continuous wave (FMCW) Doppler shifts in a trio of modulated light beams to measure distance and velocity vectors taken from three sites on the moon’s surface. One laser and an optical modulator generate a modulated beam that’s optically split and conveyed via optical fiber to three lenses in a passive optical head. The lenses emit the modulated light and collect the reflected light, which is then converted into electrical signals by photodetectors and processed in real time to generate the distance and velocity readings. Early NDL prototypes were initially built with PC-104 board stacks and experimentally tested on elevated platforms, trucks, helicopters, and NASA’s rocket-powered Morpheus prototype lander. Having proven the concept, NASA Langley developed final flight hardware that uses two FPGAs for real-time signal processing.
One of the two FPGAs is an AMD/Xilinx Virtex 5, which performs the necessary real-time computations, including nine 256-point FFTs every 23.8 milliseconds. That’s more than 40 readings per second. The second FPGA is either a Microchip/Microsemi ProASIC3 in an adapter or an RTAX FPGA, which serve as a housekeeping unit. Although the logic in the Virtex 5 FPGA is triply redundant and unlikely to fail due to an SEU (single event upset), the ProASIC3 FPGA can reload the Virtex 5 FPGA with configuration information taken from an attached NAND Flash memory if needed. The ProASIC 3 FPGA uses an on-chip EEPROM for configuration. The RTAX FPGA uses configuration anti-fuses, and is therefore very unlikely to fail due to SEUs. A block diagram of the NDL electronics appears below.
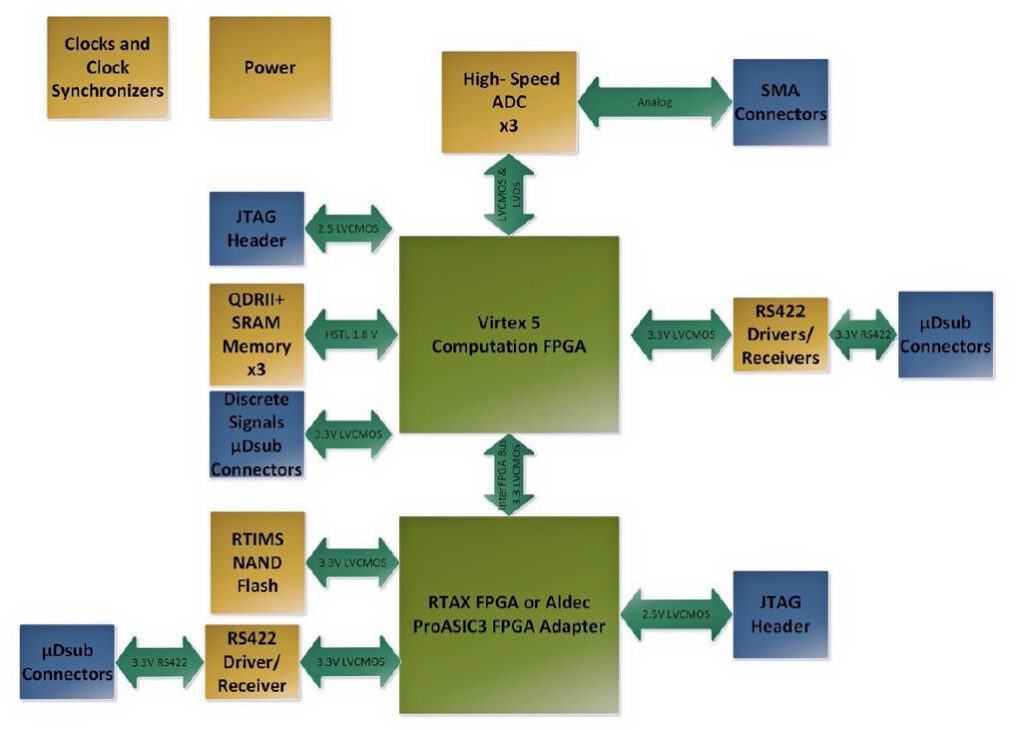
Block diagram of the NDL electronics showing the on-board Virtex 5 and ProASIC3 FPGAs. Image credit: NASA Langley Research Center
The successful operation of the NDL makes the case for redundant instrumentation on spacecraft. A critical failure such as the loss of the Odysseus laser rangefinder can cripple a mission. It was fortunate that the NDL was on board Odysseus to act as a backup, and equally fortunate that programmers at Intuitive Machines could patch the NDL into the spacecraft’s landing software in just one orbit.
Odysseus operated on the moon for several days before Intuitive Machines put the craft into sleep mode. It may wake again when the sun rises, if the batteries and electronics survive the long, cold night on the moon. Although many will say the IM-1 mission was not fully successful because it didn’t meet all its objectives, it is the first commercial spacecraft to land on the moon and survive. Odysseus landed in the extremely difficult terrain near the moon’s south pole, many of the on-board payloads produced usable data en route to and on the moon, the NDL is now rated by NASA as TRL-9, and Intuitive Machines learned a tremendous amount over the mission’s 7-day duration. Call it a partial success, if you like, but IM-1 was largely successful in my opinion, despite a broken leg or two.
Update: As of March 25, this article’s publication date, it does not appear that Odysseus will be able to power up again. It’s power system doesn’t seem to have survived the moon’s night, which was not a mission objective, but it would have been great to see the lander power up again with the rising sun.





“The Moon is a Harsh Mistress” is one of my favorite Heinlein books (as a kid I also used to like “Space Family Stoke, which was called “The Rolling Stones” in the USA, and “Red Planet,” and “Farmer in the Sky,” and… don’t get me started