

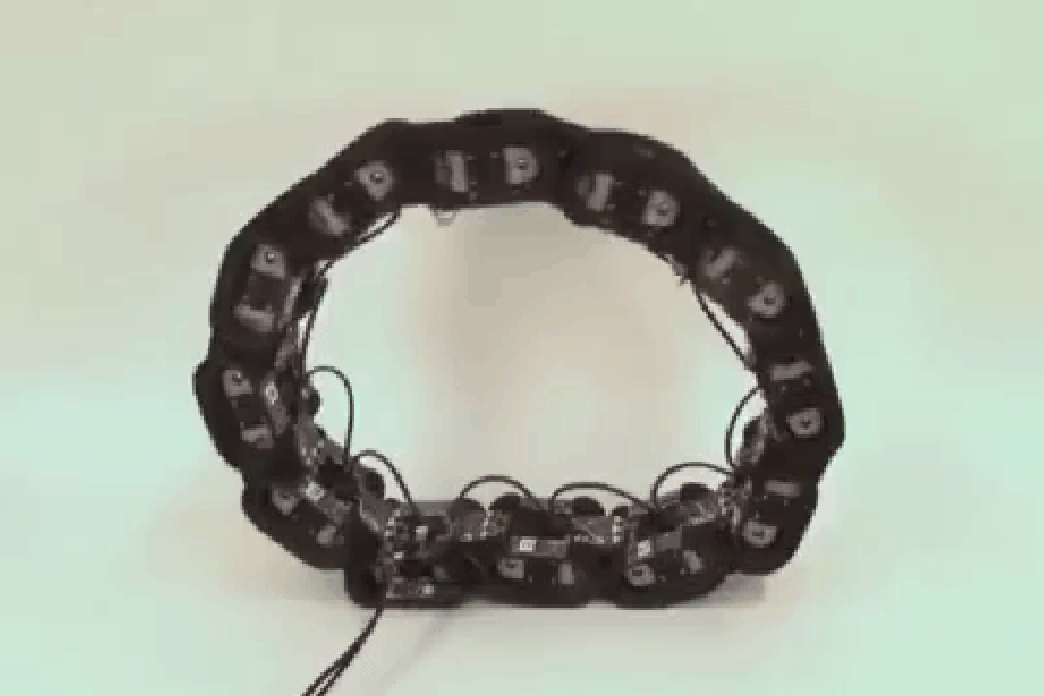
Researchers from Germany’s University of Bielefeld presented their OUROBOT, a “Self-Propelled Continuous-Track-Robot for Rugged Terrain,” at the recent IEEE International Conference on Robotics and Automation. From their technical paper:
Adapting the concept of continuous tracks that are propelled and guided by wheels, a self-propelled continuous-track-robot has been designed and built. The robot consists of actuated chain segments, thus enabling it to change its form, independent of guiding mechanisms. Using integrated sensors, the robot is able to adapt to the terrain and to overcome obstacles. This allows the robot to “roll” and climb in two dimensions.
via Boing Boing




